Jalani Eanochs - Computational Engineer
Physics-based Modeling | FEA + CFD | Embedded Systems
I build and validate numerical tools that solve engineering boundary-value problems and deliver actionable simulation insights for complex physical systems.
I have a passion of applying the principles of physics and mechanics to real-life problems.
Projects: Solid-state battery modeling, FEA solver, CFD analysis → see below.

Featured Engineering Projects
Tessella: Automated FEA Battery Analysis Pipeline
The working program of my graduate thesis, Project Tessella was designed to analyze the behavior of solid-state batteries. With each battery ion grain modeled as a seed region in a Voronoi tessellation, the battery's ion concentration is predictively modeled using first principles and the finite element method.
Skills and Frameworks Used
Python
SciPy/NumPy/Tkinter
SFePy
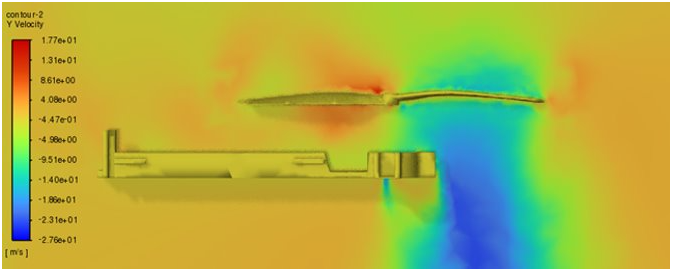
CFD Analysis of Drone Propeller using Ansys
During my senior year at Tuskegee University's Additive Manufacturing Laboratory, I was assigned to create a computational model in Ansys Fluent to model the thrust force of an APC drone propeller. The results correlated very closely with experimental results, verifying the model's accuracy.
Skills and Frameworks Used
ANSYS Fluent
Aerodynamics
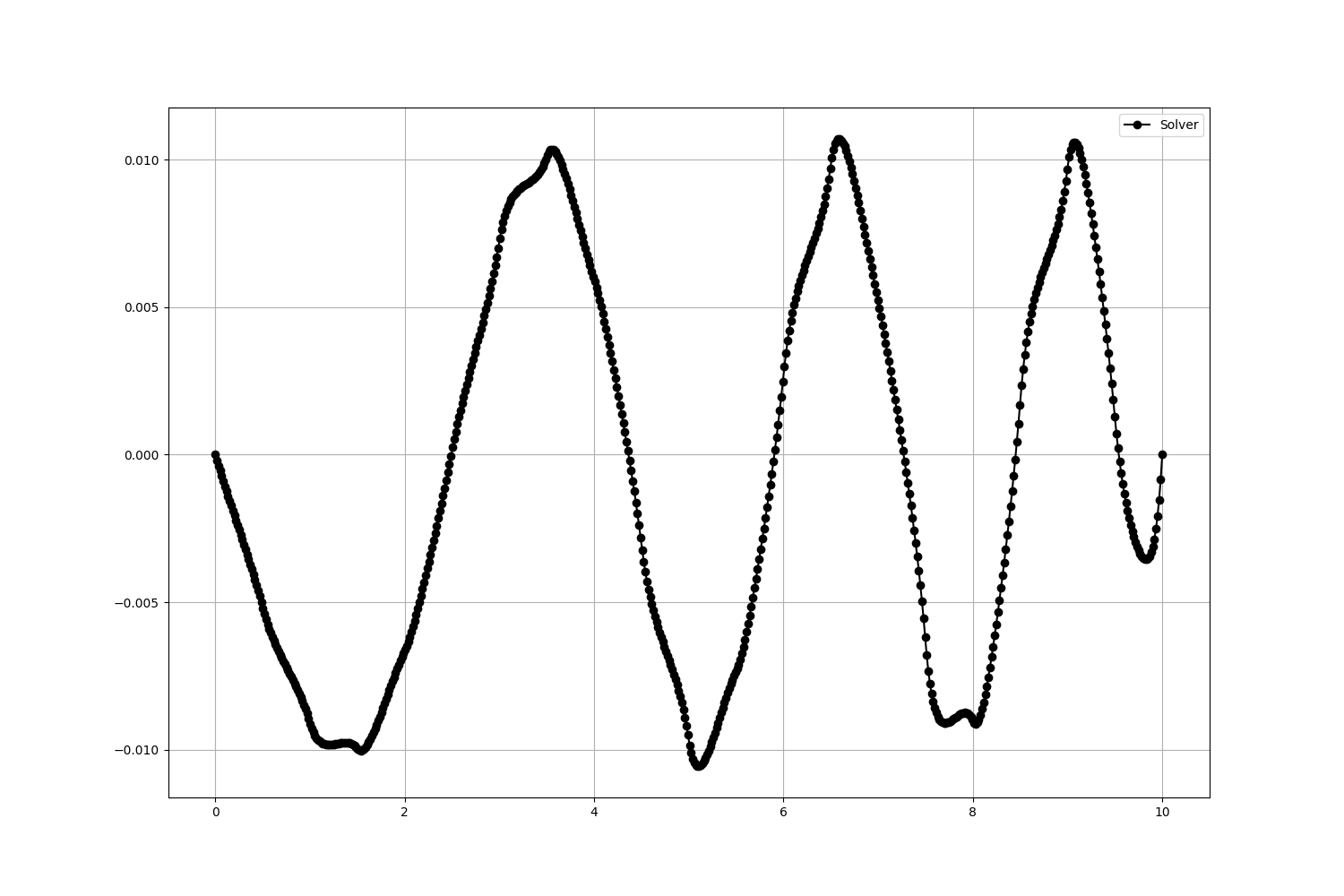
FEM Solver for Ordinary Differential Equations
Using the GNU Scientific Library as the mathematical backend, the solver is currently capable of solving ordinary differential equations (ODE) with constant coefficients via the finite element method. The equation can either be homogeneous or nonhomogeneous.
Skills and Frameworks Used
C
GNU Scientific Library
Skills and Experience
Core/Daily Use
- Python - Numerical methods, solvers, visualization
- C/C++ - Performance-critical computation, memory-aware design
Strong Working Knowledge
- Finite Element Methods - Formulation, implementation, validation
- CFD - Simulation setup, boundary conditions, interpolation
Applied Knowledge
- Embedded Systems - Microcontrollers, low-level interfacing
- Robotics - Kinematics, control concepts